


四元数数控
NEWS
全国服务热线
15818624218
15818624218

深圳市四元数数控技术有限公司
手机: 15818624218
邮箱:liusyscnc@qq.com
QQ:790708208
地址:深圳市光明区光明街道碧眼社区华强创意公园5栋A座19楼
邮箱:liusyscnc@qq.com
QQ:790708208
地址:深圳市光明区光明街道碧眼社区华强创意公园5栋A座19楼
 当前位置:
当前位置:视觉定位系统如何实现定位及引导贴合的应用
产品详情
机器视觉系统可以起到人类视觉的作用,利用自动化科技来替代人眼,使质量进一步升级,不仅可以提高工作效率,而且减少了人工产生的不确定因素对质量控制效果的影响。而且基于机器视觉系统对位贴合系统可以做到贴合精度高,速度快,节省人力的特点。
视觉定位系统案例详解
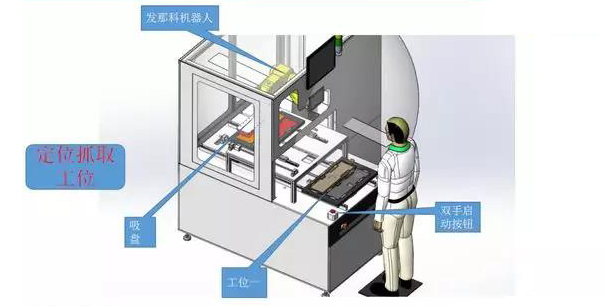
方案采用上下双层送料方式,分为工位一、工位二,下层为盖板,双工位循环进出工作。由于客户的产品体积大,一个相机无法保证装配的精度,我们决定采用工业机器人+双相机方案,以相机引导机器人到达对应位置来实现定位及引导贴合的应用。
系统中的双相机分别安装在机器人的上方,通过计算标准拍照位置与实际拍照位置的位置与角度的差异来补正装配位置。
设备示意图
实施步骤
1.训练(示教)
机器人从最优装配位置取一块安装好的工件到相机拍照位置,通过定位工具训练工件,记录特征点的图像上的坐标与空间上坐标以及特征角度。
2.运行
每次运行通过定位工具,获取当前工件特征点在图像空间中的坐标,在通过标定工具,将特征点的图像坐标转换为空间坐标。
3.计量偏移量
计算运行时工件特征点与训练时保存的特征点在空间坐标上的差值,及特征角度的差值。
4.输出结果
将计算结果通过网口通讯发送给机械手进行装配位置补正。
视觉定位系统应用前景
本文描述了基于机器视觉的工业机器人视觉定位系统,该系统运用快速识别工件特征边界和质心,数据分析和计算。机器人通过计算出的结果进行调整为姿,从而解决了机器人末端实际位置与期望位置相距偏差的问题,改善了装配机机器人的定位精度。该方法计算量小,定位准确,速度快,具有工程实用性,有很大的发展前景